W projekcie „Cyfrowy świ@t wokół n@s” uczniowie wykonywali różne zadania, które sami proponowali. Projekt pozwolił opanować podstawy programowania i kodowania, bezpieczeństwa w internecie, netykiety, naukę ze smartfonem/tabletem. Do realizacji tych zadań uczniowie wykonali min. mini projekty: Z założenia projekt miał na celu podniesienie poziomu kompetencji w zakresie wykorzystania narzędzi TIK w edukacji przez: Projekt był podzielony na kilka etapów/faz. Faza wprowadzająca Mieli szansę na podanie swoich pomysłów oraz wizji jak chcieliby pracować. Udało się zebrać je w całość i stworzyć listę zadań, gdzie uczniowie sami decydowali o tym kto będzie realizował zadanie i w jakim czasie przedstawi efekty jego realizacji. Stworzono harmonogram działań, który znacznie ułatwił organizację zajęć w fazie projektu realizowanego jeszcze swobodnie w szkole. W ten sposób po kilku godzinach pracy można było przejść do krótkiej fazy organizacyjnej projektu. Faza organizacyjna Uczniowie przydzielają sobie zadania, następuje podział na mniejsze grupy. Burza mózgów, wspólna dyskusja, opowieści o dzisiejszych możliwościach informatycznych, zwłaszcza w kontekście IOT (Internet of Things) jeszcze bardziej rozbudziły entuzjazm i zaanagażowanie uczniów w zadania realizowane w projekcie. Szybko okazało się, że wszyscy chcą uczestniczyć w większości zadań projektowych. Na szczęście harmonogram zawsze umożliwia naniesienie zmian według potrzeb uczestników projektu. Realizacja projektu- Scottie-Go czyli przeprowadzenie robocika Scottie po częściach naszej planety w poszukiwaniu części. Etap w którym uczniowie poznali zasady gry, uczyli się używać instrukcji prostych i złożonych, zapoznali się z pojęciem i działaniem pętli oraz instrukcji warunkowej. Początki w ScottieGo były łatwe, instrukcje proste, ale im dłużej Scottie podróżował po planecie, tym trudniej było napisać krótki algorytm – taki na „trzy gwiazdki”-który był celem uczniów. Uczniowie byli podzieleni na grupy – a gra przyjęła charakter wyścigu drużynowego o naprawienie statku sympatycznego robocika. Niewątpliwie dodanie elementów gamifikacji uatrakcyjniło grę i samą rozgrywkę, przy okazji przemycając myślenie programistyczne, które uczniowie wykorzystają w programowaniu robotów w LegoWeDo. Etap II -LegoWeDo 2.0 Lego nie tylko ćwiczy myślenie przestrzenne, ale także pomaga w zrozumieniu działania elementów technicznych zestawu. Dzięki scenariuszom, uczniowie przy konstrukcji danego modelu praktycznie poznają działanie czujników, silników, łaczników, przekładni i innych atrybutów LegoWeDo. Zadania z LegoWeDo cieszyły się dużą popularnością wśród uczestników projektu. Bardzo pomocna była aplikacja tabletowa do konstruowania modeli z Lego. Aplikacja w sekcji „classroom projects” pokazywała jak krok po kroku zbudować wybrany model. Kolejnym etapem było uruchomienie programu do sterowania Lego robotem. Uczniowie zaczynali od prostych projektów, sam przekonali się na czym polega działanie czujników zbliżeniowych[link], na podczerwień, obserwowali jak działa silniczek[. Szybko okazało się, że wgrane podstawowe oprogramowanie nie wystarczało, więc trzeba było je modyfikować według własnych potrzeb. Potrzeby zmieniały się w miarę zaawansowania w poszczególnych etapach konstrukcyjnych. I tak okazało się, że wiatraczek powinien dawać więcej wiatru, czyli kręcić się szybciej[link], chodząca maszyna miała doczepione sanki[link] z obciążeniem, a wyścigówki[link] ścigały się ze sobą, tworząc prawdziwa walkę robotów za którą stoi człowiek. Roboty Lego były szybko wykorzystane dość kreatywnie. Były wyścigi robotów, tor przeszkód, zadanie z fizyki (której nie ma w sylabusie 6 klasy), oraz roboto-sanki. Ciekawym eksperymentem było spięcie ze sobą dwóch robotów „ślimaków[link]”, każdy miał niezależne sterowanie przez bluetooth tabletem. Roboty najpierw miały wykrywać i omijać przeszkody[link], potem uczniowie zauważyli, że ich sterowanie przypomina kierowanie czołgiem. Jako podkładkę zastosowano niepotrzebną tablicę. Czujnik w „ślimaku” został później wykorzystany przy budowie samochodu wyścigowego[link], który był uruchamiany przez machnięcie ręką lub nogą. Dość przejrzysta aplikacja do programowania ruchu i zachowania robota była chętnie modyfikowana przez uczniów. Modyfikowano też pierwotne przeznaczenie klocków. Roboto-sanki uczniowie konstruowali specjalnie aby wywołać efekt „epic fail”[link] – niestety pierwszy najbardziej efektowny rozpad robota nie został zarejestrowany. Kolejnym przykładem kreatywnego wykorzystanie robota Lego była nietypowa, sobotnia lekcja fizyki. Uczniowie zdecydowali się porobić pomiary ruchu wyścigówki[link]. Dodatkową atrakcją było pisanie po szkolnej podłodze pisakiem zmazywalnym- zapisy wzbudziły dużą ciekawość wśród uczniów i nauczycieli, którzy w poniedziałek rano zaczynali lekcje na II piętrze. Po skonstruowaniu wyścigówki, uczniowie rozmierzyli tor co 50 cm, ustalili role i zapisywali wyniki pomiarów na podłodze. Ruch auta był modyfikowany programem w tablecie. Etap III- Zabawa z Jimu w wolnej chwili Szkoła w swoich zasobach posiada robota Jimu[link], który jest dość zaawansowany konstrukcyjnie. Po zapoznaniu się wcześniej z robotem, min. przez filmy instruktazowe na Youtube, uczniowie podłaczyli i skonfigurowali ruchy robota na tablecie projektowym. Etap IV -Logo Przy projektowaniu logo uczniowie mogli zastosować tradycyjne techniki (farba, kredki, pisaki) lub cyfrowe metody. Projekt musiał być tak zrobiony, żeby nadawał si do wydruku na długopisie, kubeczku, smyczy, koszulce, naklejce, wizytówce etc[link]. Uczniowie korzystali z aplikacji online np: free logo desin, hatchfulshopify com, logaster, logomaster, czy otologo Dzięki zabawie w logo, uczniowie poznali dość użyteczne, darmowe aplikacje, które będą mogli wykorzystać w innych zadaniach szkolnych. Etap V -Prezentacje Nazwa szkoły: Szkoła Podstawowa im. Wincentego Pola w StawiszynieZałożenia projektu
——————————————-
Realizacja
—————————————-
Uczniowie na kilku spotkaniach mieli okazję dowiedzieć się o założeniach CSW2020, zaproponować swoje pomysły na realizację zadań projektowych.
Uczniowie zapoznali się z podstawami robotyki na przykładzie LegoWeDo 2.0., stworzyli swoje pierwsze modele, a przy konstruowaniu robotów wspomagali się aplikacją na tablecie.
Jednym z zadań wykonywanych zdalnie przy pomocy aplikacji Teams było zaprojektowanie logo[link] projektu. Uczniowie musieli sami wyszukiwać potrzebnych informacji o tym jak takie logo powinno wyglądać i co powinno zawierać. Dzięki Teams można się było spotkać i omówić założenia zadania.
Chętni uczniowie wykonywali także dodatkowe zadanie, jakim było stworzenie prezentacji przy pomocy platformy Teams. Tematy prezentacji były związane z zadaniami projektowymi oraz pracą zdalną. Uczniowie przygotwali prezentacje o madrym wykorzystaniu smartfona i o bezpiecznym korzystaniu z zasobów Internetowych.Multimedia
—————————————-
Zespół projektowy
Nauczyciel – opiekun grupy projektowej: Przemysław Jarzębski
Uczniowie – członkowie zespołu projektowego:
Patryk Bielak
Adam Czarnota
Kinga Garczarek
Bartłomiej Klimkiewicz
Karolina Kubiak
Rafał Ligocki
Nikola Lipińska
Melania Lis
Łukasz Matusiak
Jakub Michalak
Wiktoria Michalska
Zofia Napruszewska
Sylwia Olszanowska
Gabriela Pawłowska
Jakub Pomykała
Kacper Rodak
Anastazja Rogacka
Emilia Rojek
Agata Wierucka






 udzielała lekcji na kursach w „Oświacie Dorosłych”. W roku 1947/48 ukończyła Państwowy Wyższy Kurs Nauczycielski w Poznaniu – wydział matematyczno-fizyczny.
udzielała lekcji na kursach w „Oświacie Dorosłych”. W roku 1947/48 ukończyła Państwowy Wyższy Kurs Nauczycielski w Poznaniu – wydział matematyczno-fizyczny.


















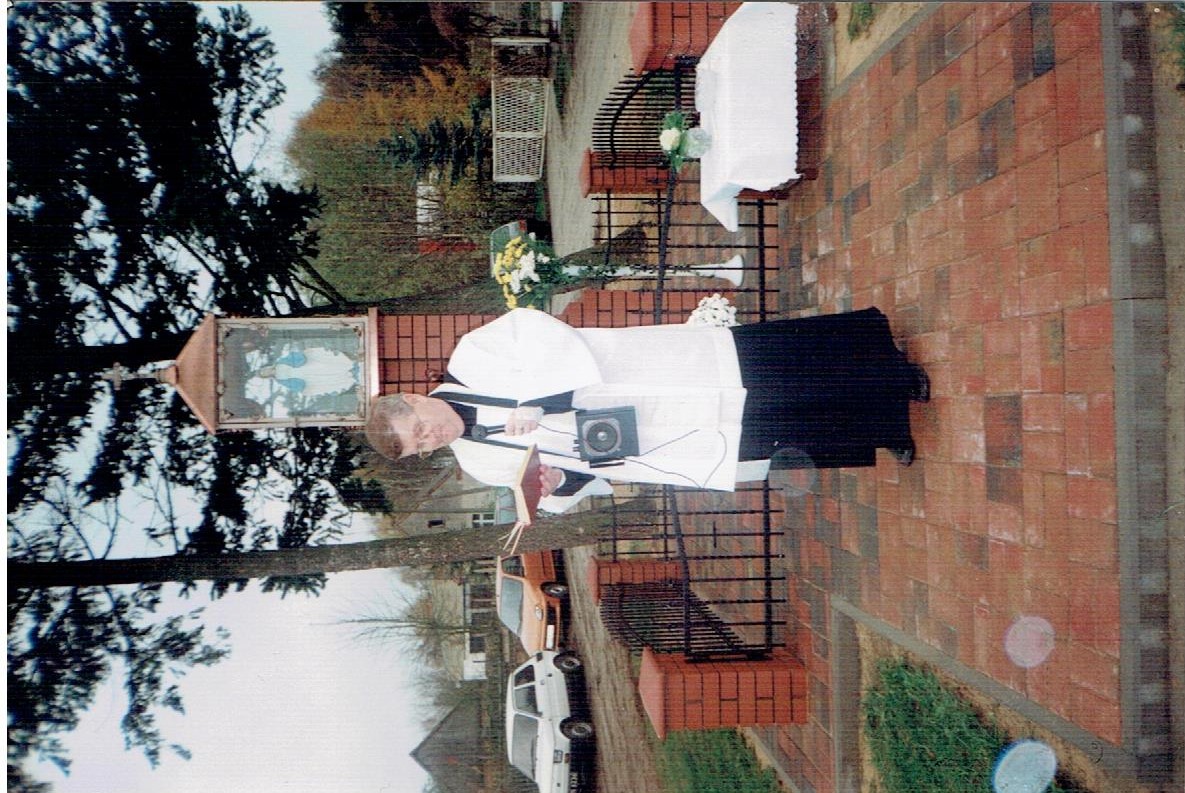 W 2004 roku odbudowano zniszczoną siłami natury Figurę Matki Boskiej z 1898 roku, która to już raz uległa zburzeniu podczas okupacji przez Niemców. Podczas tej odnowy znaleziono ukryte w figurze dokument z 1898 roku, który jest napisany w języku polskimi niemieckim oraz dokument z 1945 roku sporządzony w języku polskim z którego dowiadujemy się, że liczba mieszkańców wynosiła wówczas 450 osób . W 2004 roku również dołączono dokumenty opisujące kto przyczynił się do budowy nowej figury, ogólne wiadomości o Orliczku. Dołączono do nich również ówczesną walutę i zamurowano to w cokole;
W 2004 roku odbudowano zniszczoną siłami natury Figurę Matki Boskiej z 1898 roku, która to już raz uległa zburzeniu podczas okupacji przez Niemców. Podczas tej odnowy znaleziono ukryte w figurze dokument z 1898 roku, który jest napisany w języku polskimi niemieckim oraz dokument z 1945 roku sporządzony w języku polskim z którego dowiadujemy się, że liczba mieszkańców wynosiła wówczas 450 osób . W 2004 roku również dołączono dokumenty opisujące kto przyczynił się do budowy nowej figury, ogólne wiadomości o Orliczku. Dołączono do nich również ówczesną walutę i zamurowano to w cokole;

